Vehicle Detection & Tracking
Vehicle Detection & Tracking
-
Created a pipeline to detect and track vehicles in a video using OpenCV, Histogram of Oriented Gradients (HOG) feature descriptor and Support Vector Machines.
-
Implemented a novel multiscale sliding windows method to search for detections and leveraged heatmaps to combine overlapping detections and remove false positives

Advanced Lane Lines Detection
Advanced Lane Lines Detection
-
Developed an advanced lane-finding algorithm using distortion correction, image rectification, color transforms, and gradient thresholding. Identified lane curvature and vehicle displacement.
-
Implemented a novel solution comprised of Adaptive Thresholding to overcome environmental challenges such as shadows and pavement changes

Behavioural Cloning
Behavioural Cloning
The goal of the Behavioural Cloning project was to:
-
Develop an end-to-end Deep Learning solution for self-driving cars in a simulated environment.
-
The motivation behind this approach is that the system automatically learns internal representations of the processes required to parse an input of the environment in the form of an image from a front facing camera and output a steering angle in response. This approach is inspired from the work done by NVIDIA where there was no explicit decomposition of the problem, such as lane line detection, path planning and control. The end-to-end system optimizes all the processing steps simultaneously.
-
Succesfully complete atleast one lap of Track 1
-
Evaulate the model performance on Track 2 (alot harder due to varying light conditions and sharp turns)
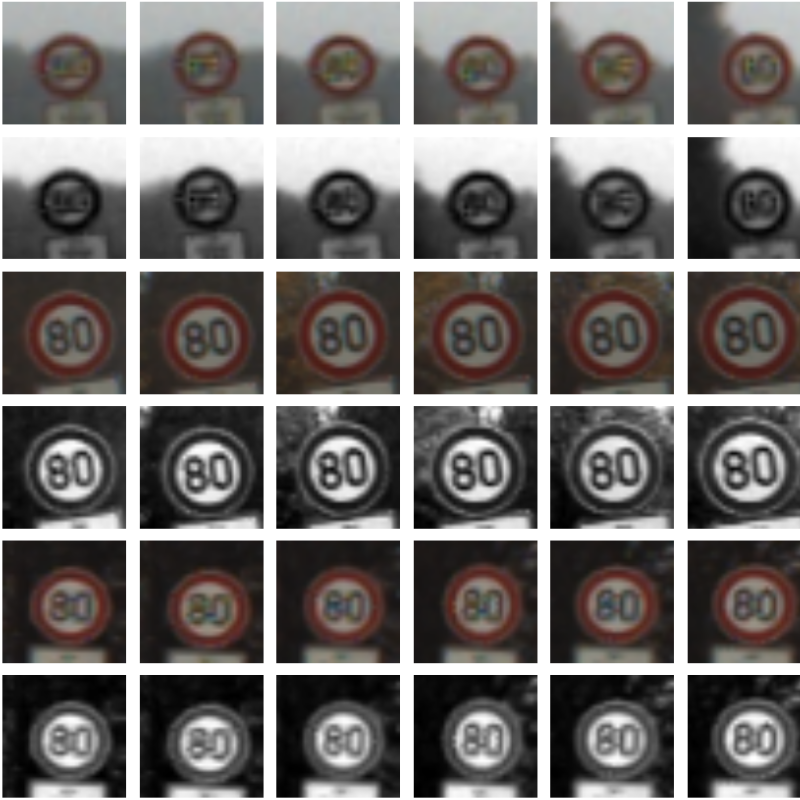
Traffic Sign Classifier
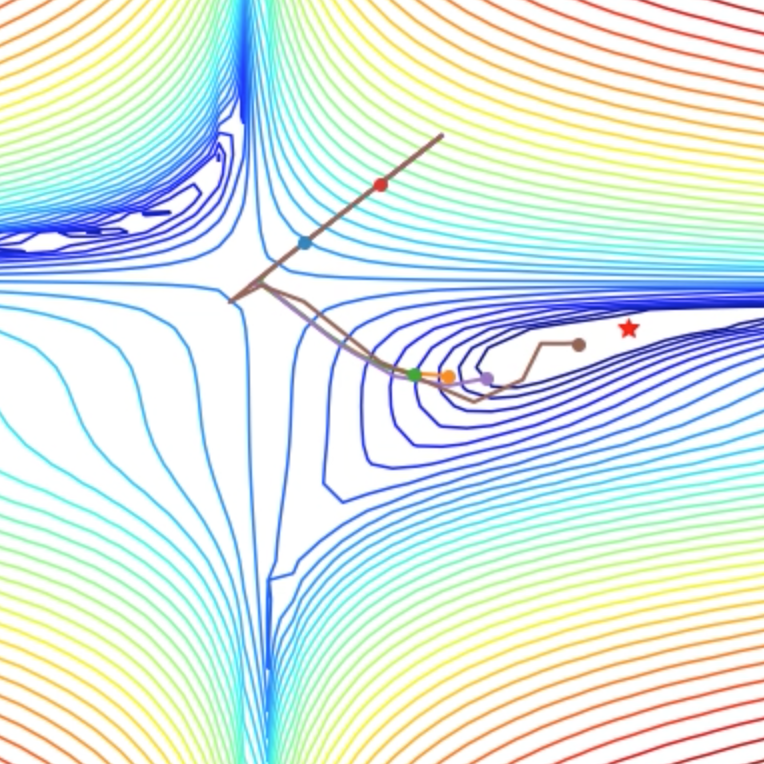
Visualising Gradient Descent Optimisation Techniques

Miniflow

Lane Line Detection
Self Driving RC Car
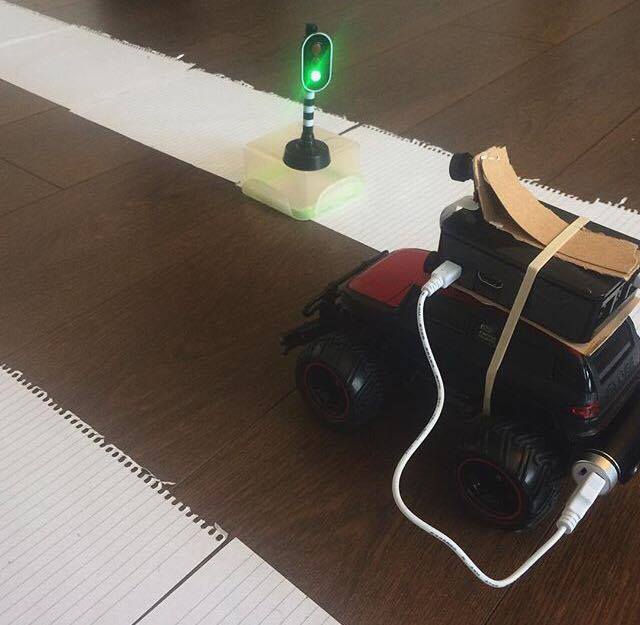
Self Driving RC Car
A scaled down version of self-driving system using Neural Networks and OpenCV. The system comprises of:
- Raspberry Pi with a camera and an ultrasonic sensor as inputs,
- Server that handles:
- Steering using NN predictions
- Stop sign and traffic light detection using Haar feature based Cascade Classifiers
- Distance measurement through monocular vision
- Front collision avoidance using an ultrasonic sensor
- an Arduino board for RC car control
Sign Language Recogniser
Sign Language Recogniser
Content coming soon…